





























Vous découvrirez dans ce chapitre :
| En bref | En détails | En photos |
En bref
Le groupe Ward-
Pour une faible variation du courant d’excitation de la génératrice, il était possible de maîtriser des puissances énormes de moteurs à courant continu dans une plage de variation de vitesse très étendue.
L’électronique de régulation de vitesse est venue supplanter le système du groupe Ward-
- soit directement un moteur à courant alternatif,
- soit le moteur à courant continu seul rescapé du groupe Ward-
Léonard.
En détails
| En bref | En détails | En photos |
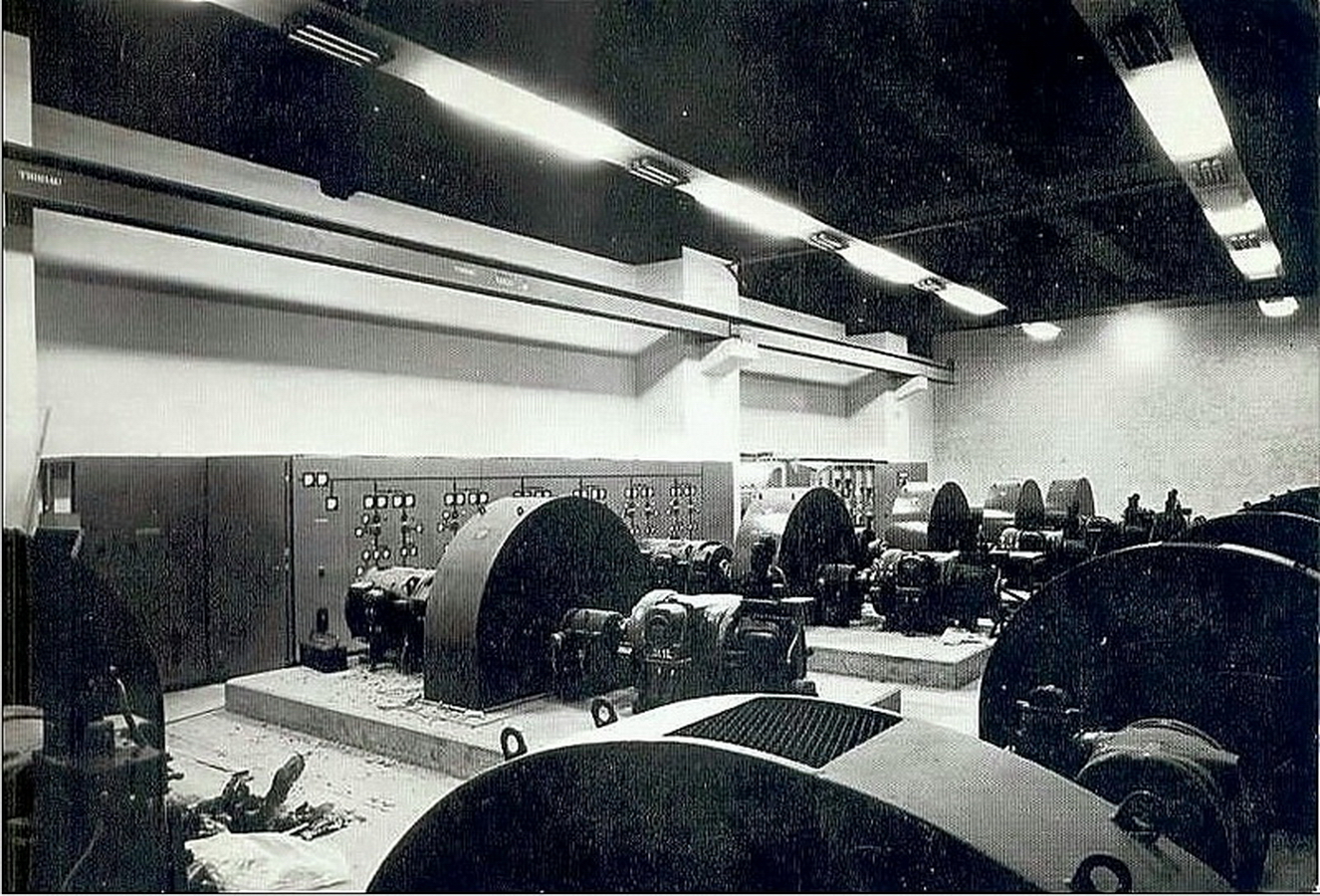
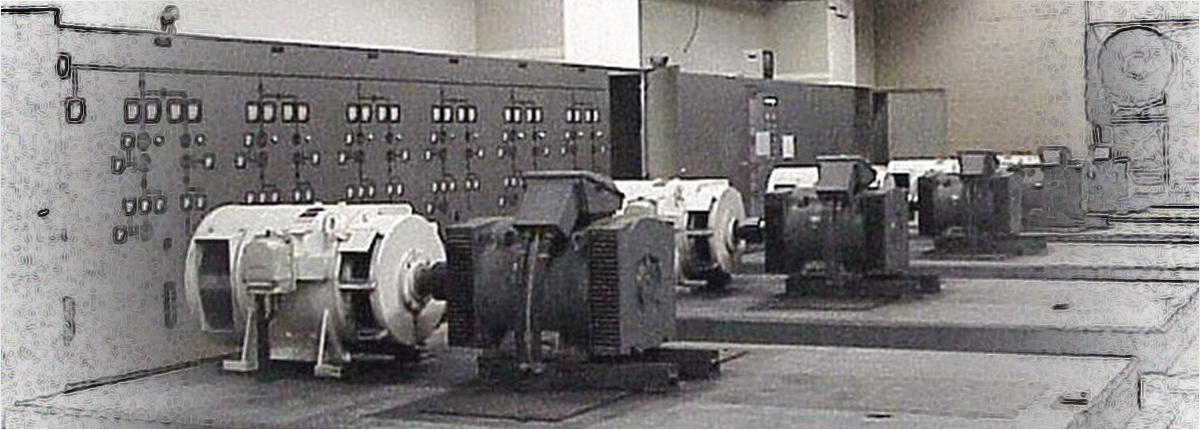
Le groupe Ward Leonard est un moteur qui entraine une génératrice. L’énergie que cette génératrice fournit est utilisée pour commander à nouveau un moteur. Le but du groupe est d’obtenir un réglage très précis de la vitesse de rotation du moteur, un réglage qui jusque dans les années 1970 n’était possible qu’avec un tel montage.
Le moteur primaire peut être un moteur diésel ou une turbine à vapeur, mais il est également possible d’utiliser un moteur qui est alimenté par le réseau électrique. Dans l’exemple ci-dessus il s’agit d’un moteur triphasé qui peut retourner de l’énergie au réseau quand le groupe freine la charge. Le moteur fonctionne alors en alternateur.
Le moteur commande deux dynamos:
- une dynamo d’excitation BG qui fournit l’excitation de toutes les machines à courant continu
- une dynamo de régulation ou dynamo de puissance GG qui fournit le courant d’induit au moteur à courant continu GM.
L’excitation de la dynamo de régulation se fait avec un rhéostat OR qui permet également d’inverser la polarité du champ
La tension Ua produite par la dynamo d’excitation est le courant d’induit du moteur à courant continu.
La dynamo de puissance a souvent une excitation série supplémentaire (indiquée en rouge sur le schéma) ce qui lui donne une caractéristique compound. Quand la vitesse du moteur diminue, la force contre-électro-motrice diminue. Le courant dans le moteur et dans l’inducteur série augmentent. L’excitation de la dynamo augmente, et donc aussi la tension de sortie. Le moteur qui reçoit une tension d’alimentation plus élevée va tourner plus vite et ainsi annuler la diminution de vitesse.
Pourquoi utiliser une construction si complexe? N’est-il pas possible de régler simplement le courant du moteur? C’est possible avec un transfo variable ou avec un rhéostat. Mais il n’existe pas de rhéostats ou de transfos variables de très grande puissance. Le moteur d’extraction des puits des charbonnages a une puissance de plus de 1MW. Une telle puissance est bien nécessaire car la machine remonte en une fois plus de 10 tonnes de charbon à une vitesse supérieure à 70km/h.
Grâce à la faible résistance interne de la dynamo, un contrôle plus précis du moteur est possible. Un rhéostat avec sa résistance interne relativement élevée ne permet qu’un contrôle lâche de la vitesse de rotation, qui est également influencée par la charge.
La dynamo de régulation amplifie la puissance d’excitation par un facteur 100 (dynamo typique). Si par contre on utilise un amplidyne on obtient un facteur d’amplification de 10.000×. Il est donc possible de commander un moteur de 1MW avec seulement une puissance de 100W, et pour cela on peut utiliser un rhéostat.
Tout comme une chaine hifi qui a besoin de puissance électrique pour amplifier le signal du microphone, l’amplidyne ou le groupe Ward Leonard a besoin d’une source d’énergie externe pour fonctionner. Cette énergie est apportée par une turbine à vapeur, un moteur diésel ou un moteur triphasé. Les nombreux « perpetuum mobile » qu’on trouve sur youtube sont des fakes, une combinaison moteur-générateur ne peut pas continuer à tourner indéfiniment (en faisant bruler en plus une lampe à incandescence (label énergétique F)).
Quand le groupe Ward Leonard est mis à l’arrêt pour l’entretien, on utilise un groupe auxiliaire Cela permet de commander les cages, mais à une vitesse moindre. Le groupe Ward Leonard doit en effet fonctionner continuellement, que les cages soient en mouvement ou non, et de ce fait les charbons doivent régulièrement être remplacés, une caractéristique de toutes les dynamos et moteurs à courant continu.
Le montage Ward Leonard était fréquemment utilisé dans l’industrie, par exemple dans la sidérurgie pour régler la vitesse des cages de laminage (train à bande). Certaines cages font des aller-retour et un groupe Ward Leonard permet un réglage précis de la vitesse dans l’un et l’autre sens. Les trains à propulsion diésel utilisaient souvent un tel groupe pour envoyer la puissance aux roues.
Les pods électriques des navires (et maintenant nous sommes de retour à la Marine) étaient commandés par une machine Ward Leonard pour transmettre la puissance du moteur (turbine à vapeur ou moteur diésel) aux moteurs d’hélice. Ce montage permet un réglage de la vitesse des hélices, tandis que le moteur tourne à vitesse constante, ce qui permet un rendement plus élevé du moteur. Un schéma électrique complet se trouve ici (avec explications).
Un groupe Ward Leonard a naturellement aussi des inconvénients, principalement les pertes assez importantes: il y a une double conversion de l’énergie mécanique en énergie électrique et puis à nouveau en énergie cinétique, et ceci avec des machines à courant continu dont le rendement n’est pas fameux. Il y a des pertes mécaniques (frottement des balais) et des pertes électriques (résistance de ces même balais). Pour réduire les pertes, on faisait travailler la dynamo à la tension la plus élevée possible. En comparaison d’un module électronique, un groupe Ward Leonard est très volumineux et nécessite un entretien régulier.
Une fois que des variateurs électroniques de vitesse fiables ont été lancés sur le marché, on a remplacé les groupes Ward Leonard par de tels modules, et les moteurs à courant continu par des moteurs à courant alternatif. Le moteur alternatif est commandé directement en tension et fréquence par le module. On utilise principalement des moteurs asynchrones (à cage d’écureuil) qui ne nécessitent pratiquement pas d’entretien.
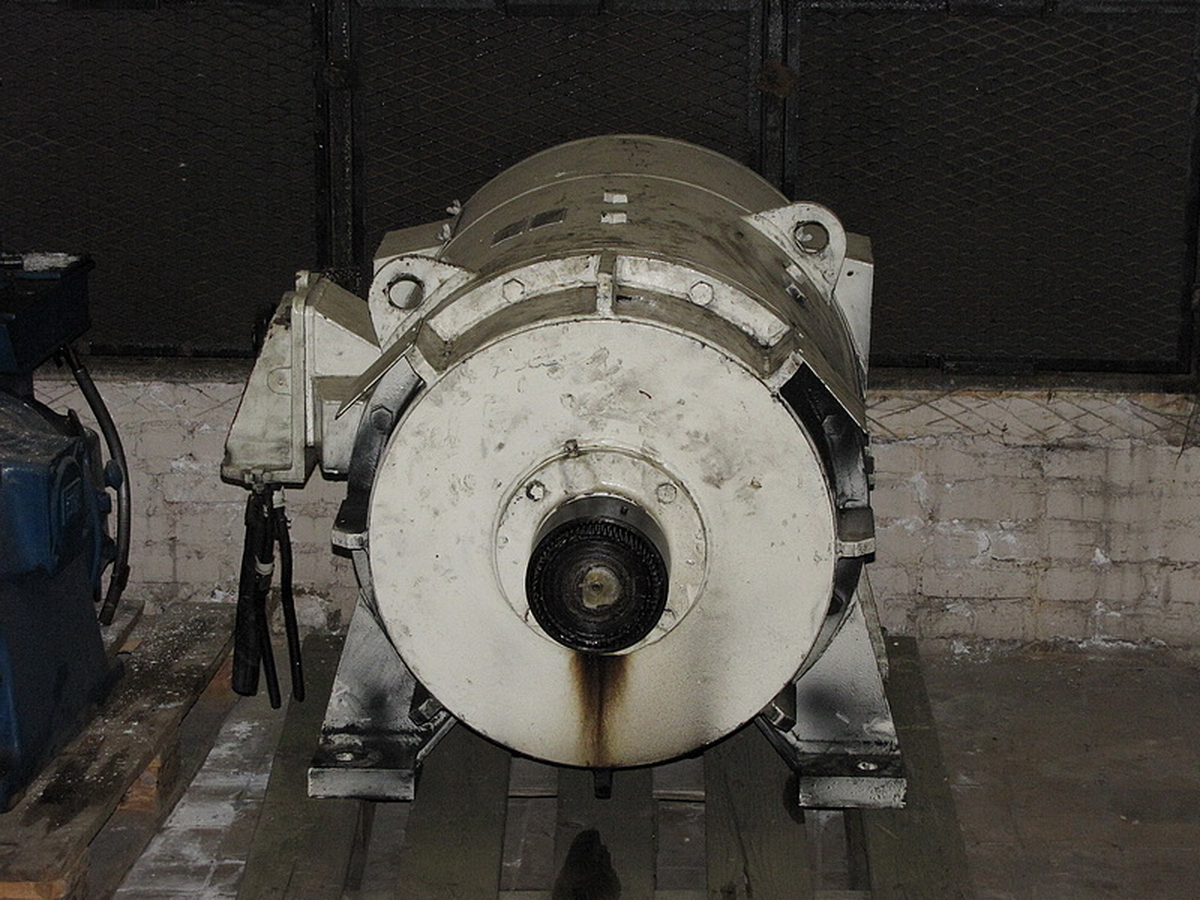
En photos
| En bref | En détails | En photos |